Precious metal brush,
Sleeve bearings RC Servo motor
| Gear | |||
|---|---|---|---|
| - | - | - | - |
| Brushless Motor | |
|---|---|
| BRS12-1503 | BRS12-1506 |
| - | - |
| Encoder | |
|---|---|
| - | - |
| Driver | |
|---|---|
| SHSD24-01A | - |
| - | - |
With Hall
sensors
sensors
Sintered
sleeve bearing
sleeve bearing
Nd-Fe-B
magnet
magnet
Please provide corresponding pinion gear or specify pinion paramenters for sample making.
Specifications
| BRS12-1503 | BRS12-1506 | |
|---|---|---|
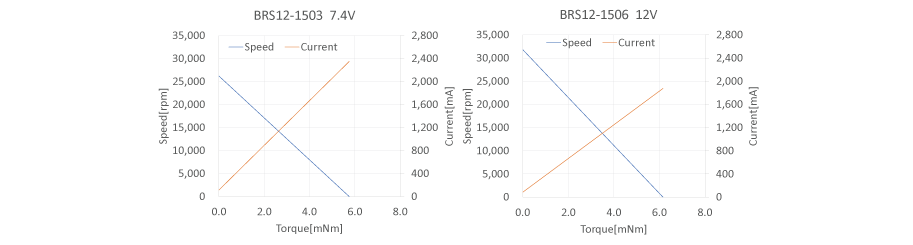
| Rated voltage[V] | 7.4 | 12 |
| No load speed[rpm] | 26,200 | 31,800 |
| No load current[mA] | 112 | 86 |
| Stall torque[mNm] | 5.75 | 6.15 |
| Stall current[mA] | 2,349 | 1,875 |
| Output power[W] | 4.0 | 5.1 |
| Max efficiency[%] | 61 | 62 |
| Terminal resistance[Ω] | 3.15 | 6.40 |
| Rated torque[mNm] | 0.82 | 0.88 |
| Rated speed[rpm] | 22,457 | 27,257 |
| Rated current[mA] | 432 | 342 |
| Friction torque[mNm] | 0.29 | 0.30 |
| Back-EMF constant[mV/rpm] | 0.269 | 0.360 |
| Torque constant[mNm/A] | 2.57 | 3.44 |
| Slope of N-T curve[rpm/mNm] | 4,559 | 5,170 |
| Mechanical time constant[ms] | 4.23 | 4.79 |
| Rotor inertia[gcm2] | 0.08 | 0.08 |
| Max torque[mNm] | 1.92 | 2.05 |
| Inductance[mH] @1kHz | TBD | 0.150 |
| Thermal resistance Rth1(coil-housing)[K/W] | TBD | TBD |
| Thermal resistance Rth2(housing-ambient)[K/W] | TBD | TBD |
| Shaft raddial play[mm] | 0.05 | |
| Shaft axial play[mm] | 0.02‐0.2 | |
| Max shaft radial load[N] | 0.5(1.6mm ※1) | |
| Max shaft axial load[N] | 0.15 | |
| Max shaft axial load at standstill[N] | 7.8 | |
| Operating temperature[℃] | -20‐+80 | |
| Max coil temperature[℃] | 90 | |
| Weight[g] | 8.5 ※2 | |
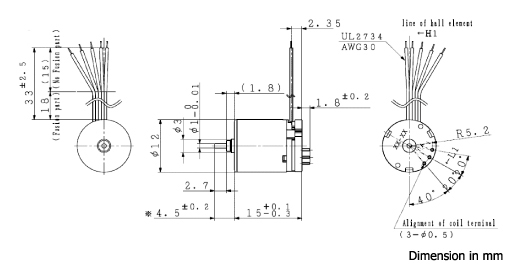
※1 measured at ( )mm point from flange
※2 Weight without pinion
Electrical connections
| BRS12-1503 / BRS12-1506 | ||
|---|---|---|
| #1 | U | Motor winding U |
| #2 | Hw | Hall sensor output W |
| #3 | Vdd | Input voltage 3.0V(1.6‐5.5V) |
| #4 | V | Motor winding V |
| #5 | Hv | Hall sensor output V |
| #6 | Gnd | GND |
| #7 | W | Motor winding W |
| #8 | Hu | Hall sensor output U |
Specification charts
Pinion options
| Module | Number of teeth | Material | |
|---|---|---|---|
| Pinion A | 0.25 | 10 | SUS303 |
| Pinion B | 0.25 | 10 | C3604 |
| Pinion C | 0.25 | 11 | C3604 |
| Pinion D | 0.25 | 18 | C3604 |
| Pinion E | 0.30 | 10 | SUS303 |
| Pinion F | 0.30 | 10 | C3604 |
| Pinion G | 0.30 | 12 | SUS303 |
If you require specifications other than those provided above, please provide the pinion that fits the shaft diameter or notify us of pinion specifications in advance.



