内閣府 総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジにて開発
現在、ロボットは溶接、組立、基板実装、パレタイズ等、多くの製造メーカーの生産現場で利用されており、ロボットは我々の生活になくてはならない存在となっています。
一方、近年、メーカーの生産現場での人との協働作業の増加、また、人が入れない特殊/危険な環境での作業のニーズにより、人の代わりにタスクを行うロボット開発が強く望まれています。そのロボットに必要不可欠なのがロボットハンドです。当社は、当社は1973年の世界最小φ10mmDCコアレスモーターの開発以来、日本におけるDCコアレスモーター・マイクロモーター(超小型モーター)のパイオニアメーカーとして培った技術を活かし、「擬人化=器用」、「無通電保持」、「高出力」に着目し、新しいコンセプトのロボットハンドを提案しています。
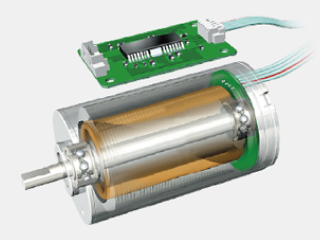
擬人化を実現するためには、多自由度が必須です。そのために指あるいは掌の中に多くのモーター、機構を搭載致します。また人の代わりに道具を使うことを考えると、ロボットハンドのサイズは、人の手サイズに近づける必要があります。指の狭隘スペースに、動力機構を搭載するため、モーターとボールねじを平行に配置するとともに、モーターの動力をボールねじとリンクを介して伝達、指の屈曲、伸展動作を行う機構を採用し小型化を実現しています。
また、従来のロボットハンドは、対象物を把持した状態を維持し続けるために大電流を小型モーターに供給し続ける必要がありましたが、当社特許取得の無通電ロック機構dyNALOXを各関節に搭載することにより、対象物を把持した後、小型モーターへの通電をOFFしても(消費電力ゼロで)、指がロックされ握り続けることが可能となり、消費電力、温度上昇を極限まで抑制できるユニークな特徴を備えています。
言い変えますと、急な停電、送電線のトラブル、バッテリー故障に遭遇してもワークをにぎり続けられる絶対的な把持信頼性が付与されているとも言えます。
また災害対策ロボットは屋外での活動が想定され、バッテリーが主電源になると考えられますので、低消費電力駆動であることは、ロボットシステム全体の稼働時間延長に寄与し、また、急なトラブルにより電源供給が遮断されても、絶対につかんだ対象物を離さないというロボットの「タフさ」に貢献致します。

図1 3指ロボットハンド外観
- dyNALOX
- 登録特許
- 特許第6142204 号
特許第5942128 号
US9,316,288
US9,618,061
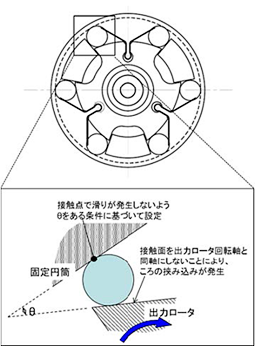
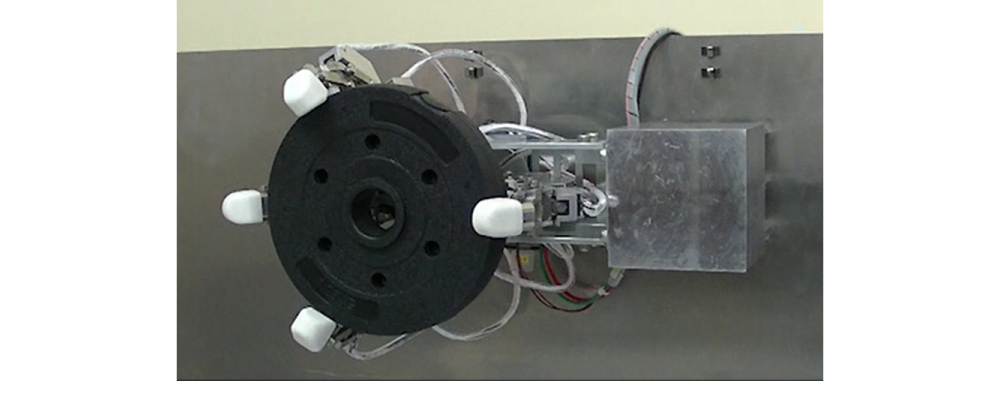
図2 無通電ロック機構概要
多指ロボットハンド
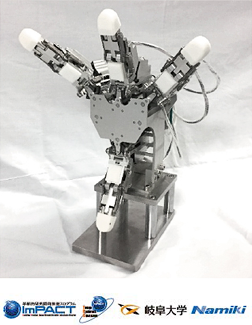
図3 多指ロボットハンド外観
内閣府 総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジにて、器用、且つ、高出力なロボットハンドを開発致しました。(共同開発機関:
岐阜大学)災害現場、プラント保全現場等、危険な環境での人間の作業の代替が期待されています。
本ハンドは、最大長さ308mm、2450gと小型ながら、4指16関節・12自由度の器用さ、指先力150Nの高出力を兼ね備えると共に、600Nの対象物の無通電保持が可能です。
本研究は、総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)の一環として実施したものです。
参考動画
小型 / 高出力 / 低消費電流+F9