モータードライバーとは入力信号に従って電流を増幅することにより、モーターの特性を可変できる電子機器です。モータードライバーは、モーターの種類に応じて使い分ける必要があります。
Orbrayでは、当社のブラシレスモーターに対応したドライバーを準備しております。
また、モーターの駆動状態を外部デバイスとの通信を可能とするI/O(Input/Output)を備えたり、専用ソフトが付属するモデルも展開しています。これらを活用頂く事でOrbrayモーターを簡単に駆動・モニターする事ができ、試作や検証の際にお役立て頂けます。
※単体での販売は行っておりません。ご購入の際は、必ずモーターと一緒にご検討ください。
| 製品名 | 適合モーター | 電源電圧 [V] |
最大出力電流 [A] |
最大回転数 [rpm] |
駆動方式 |
|---|---|---|---|---|---|
| SOD12ST | BMN02-05 | 11.5~12.5 | 0.7 | 180,000 | 正弦波 |
| SSD06-R5A | BMN04 series / BMN07 series | 1.8~5.5 | 0.25 | TBD | PWM |
| SHSD24-01A | ブラシレスモーター(ホールセンサー有無) | 7.5~26.4 | 2 | 150,000 | 速度 |
| PSV24-05E | ブラシレスモーター(エンコーダ、ホールセンサー要)※1 | 6~26 | 15 | 80,000 | 位置、速度、電流(トルク) |
ブラシレスモータードライバー
SOD12ST

仕様
| SOD12ST | |
|---|---|
| モータータイプ | ブラシレスモーター BMN02-05 |
| 電源電圧[V] | 11.5~12.5 |
| 最大出力電流[A] | 0.7 |
| 最大連続電流[A] | 0.7 |
| 最大回転数[rpm] | 180,000 |
| 指令方式 | - |
| 駆動方式 | 正弦波 |
| 保護機能 | - |
| 動作温度範囲[℃] | 0~+50 |
| 寸法[mm] | 66.1×100×32 |
| 重量[g] | 60 |
| ソフトウェア | - |
| 付属品 | ACアダプター |
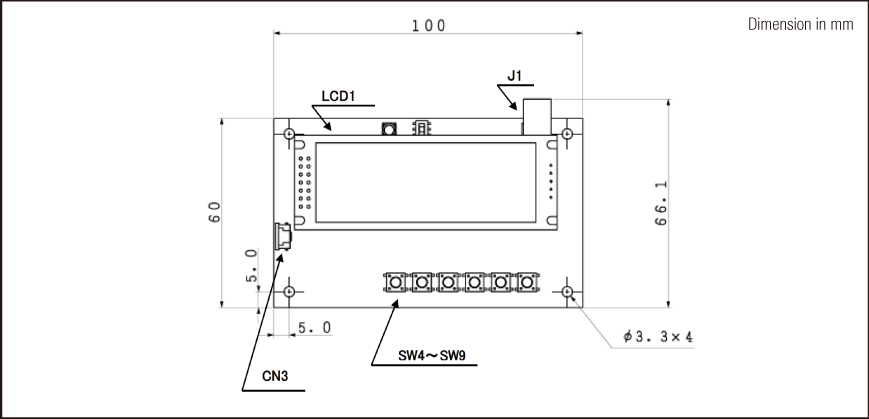
コネクタ/スイッチ/ピンレイアウト
| SOD12ST | |
|---|---|
| J1 | 電源入力 アダプター入力 |
| CN3 | モーターコネクタ |
| SW4 | 回転数設定 |
| SW5 | 回転数カウントアップ |
| SW6 | 回転方向切り替え |
| SW7 | モーター立ち上がり時間設定 |
| SW8 | モーター電圧設定 |
| SW9 | スタート ストップ |
| LCD1 | 設定状態及びモータ運転状態を表示 |
| CN3-1 | モーターコイルW 相 |
| CN3-2 | モーターコイルW 相 |
| CN3-3 | N.C |
| CN3-4 | モーターコイルV 相 |
| CN3-5 | モーターコイルU 相 |
| CN3-6 | モーターコイルU 相 |
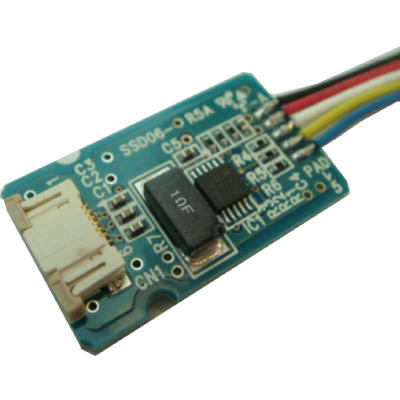
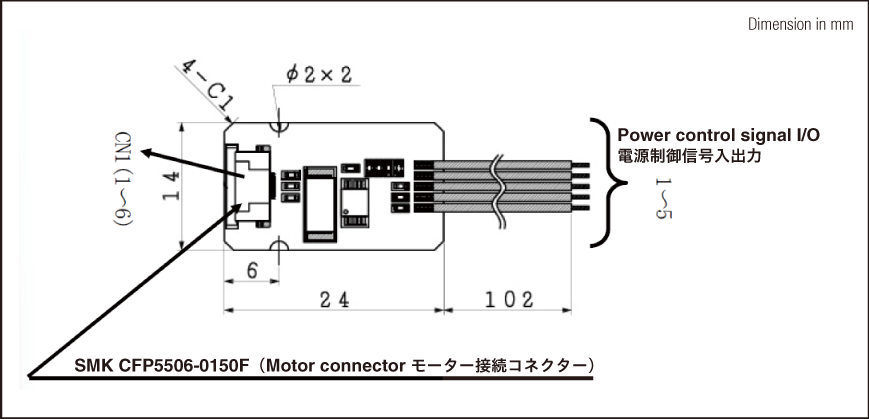
ブラシレスモータードライバー SSD06-R5A
仕様
| SSD06-R5A | |
|---|---|
| モータータイプ | ブラシレスモーター BMN04 / BMN07 |
| 電源電圧[V] | 1.8~5.5 |
| 最大出力電流[A] | 0.25 |
| 最大連続電流[A] | TBD |
| 最大回転数[rpm] | TBD |
| 指令方式 | 速度指令PWM入力 |
| 駆動方式 | PWM |
| 保護機能 | 電流制限 |
| 動作温度範囲[℃] | -20~+75 |
| 寸法[mm] | 14×24×3.8 |
| 重量[g] | 1.1 |
| ソフトウェア | - |
| 付属品 | - |
コネクタ/スイッチ/ピンレイアウト
| SSD06-R5A | |
|---|---|
| CN1-1 | W相 |
| CN1-2 | W相 |
| CN1-3 | COM |
| CN1-4 | V相 |
| CN1-5 | U相 |
| CN1-6 | U相 |
| Lead wire 1(black) | GND |
| Lead wire 2(red) | VCC |
| Lead wire 3(white) | FGパルス出力信号 |
| Lead wire 4(yellow) | 回転方向入力信号 |
| Lead wire 4(blue) | PWM デューティ制御パルス入力 |
ブラシレスモータードライバー SHSD24-01A
仕様
| SHSD24-01A | |
|---|---|
| モータータイプ | ブラシレスモーター (ホールセンター有無) | 電源電圧[V] | 7.5~26.4 |
| 最大出力電流[A] | 2 |
| 最大連続電流[A] | 1 |
| 最大回転数[rpm] | 150,000 |
| 指令方式 | デジタルI/O、アナログI/O、シリアル通信(RS232C・USB) |
| 制御モード | 速度 |
| 保護機能 | 過少電圧、過大電圧 |
| 動作温度範囲[℃] | -10~+50 |
| 寸法[mm] | 83×63×21 |
| 重量[g] | 36.5 |
| ソフトウェア | SHSD24-01A.Controller |
| 付属品 | PCB スタット、LCD(オプション) |
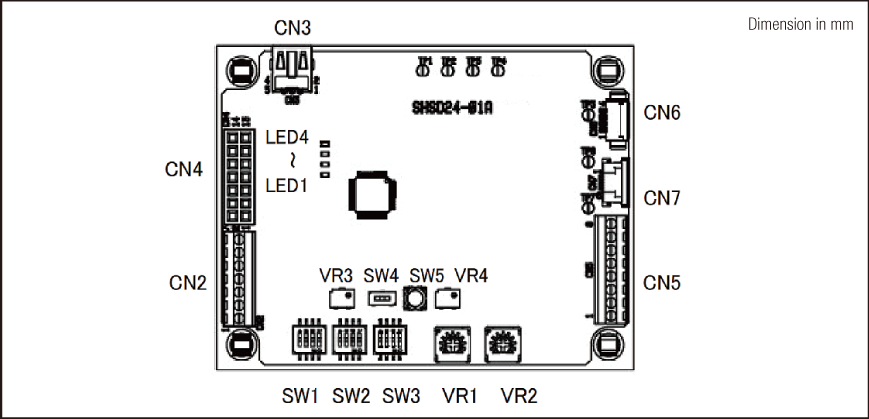
コネクタ/スイッチ/ピンレイアウト
| SHSD24-01A | ||
|---|---|---|
| CN2 | 電源及び各I/Oコネクター | |
| CN3 | RS232C通信用コネクター | |
| CN4 | LCD用コネクター(オプション) | |
| CN5 | モーター接続用コネクター(リード線タイプ) | |
| CN7 | モーター接続用コネクター(BMN04,BMN07シリーズ) | SW1 | 機種設定用SW |
| SW2 | 駆動モード及び、制御方法選択SW | |
| SW3 | PIゲイン及び、回転方向切替SW | |
| SW4 | モーター電圧選択SW | |
| SW5 | リセットSW | |
| VR1※ | モーター起動時のPWMデューティ比の調整用 | |
| VR2※ | 目標モーター回転数を調整用 (VRモード時) |
|
| VR4※ | モーター最大出力電流の調整用 | |
| LED1 | ドライバ設定エラーを表示 | |
| LED2 | モーター駆動エラーを表示 | |
| LED3 | ドライバーステータス状態を表示 | |
| LED4 | 電源状態を表示 | |
サーボドライバー PSV24-05E
仕様
| PSV24-05E | |
|---|---|
| モータータイプ | ブラシレスモーター (エンコーダ/ホールセンサー要) ※コアレスモーター駆動に関しては要相談 |
| 電源電圧[V] | 6~26 |
| 最大出力電流[A] | 15 |
| 最大連続電流[A] | 4 |
| 最大回転数[rpm] | 80,000 |
| 指令方式 | デジタルI/O、アナログI/O、シリアル通信(RS485・USB)、EtherCAT通信 |
| 制御モード | 位置、速度、電流(トルク) |
| 保護機能 | 過電流、ドライバー加熱、過電圧、インバータ回路異常、 過負荷、エンコーダ異常、ホールセンサー異常 |
| 動作温度範囲[℃] | -25~+45 |
| 寸法[mm] | 90×58×33 |
| 重量[g] | 84 |
| ソフトウェア | PSV24-Control |
| 付属品 | STOアイドルコネクタ、電源コネクタ、スペーサー(オプション)、保護カバー(オプション) |
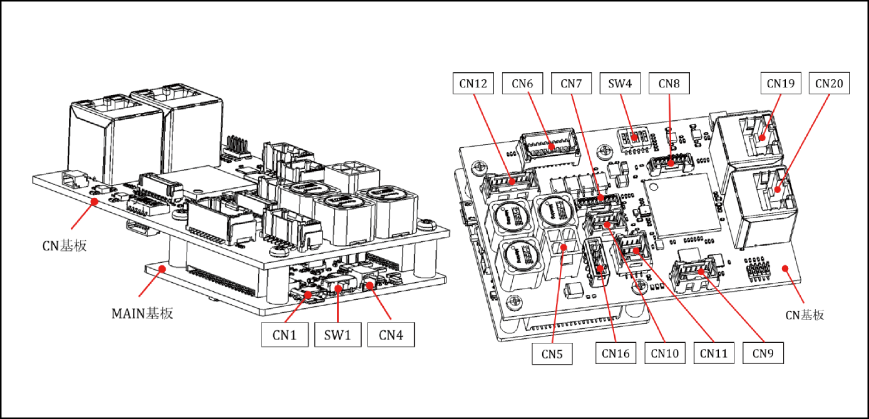
コネクタ/スイッチ/ピンレイアウト
| PSV24-05E | |
|---|---|
| CN1 | USB |
| CN4 | RS485 |
| CN5 | モーター |
| CN6 | デジタルI/O |
| CN7 | ホールセンサー |
| CN8 | アナログI/O |
| CN9 | アブソリュートエンコーダ |
| CN10 | エンコーダ出力 |
| CN11 | インクリメンタルエンコーダ |
| CN12 | STO |
| CN16 | 電源 |
| CN19 | EtherCAT(input 入力) |
| CN20 | EtherCAT(output 出力) |
| SW1 | USB/RS485 切り替え |
| SW4 | ID設定 |
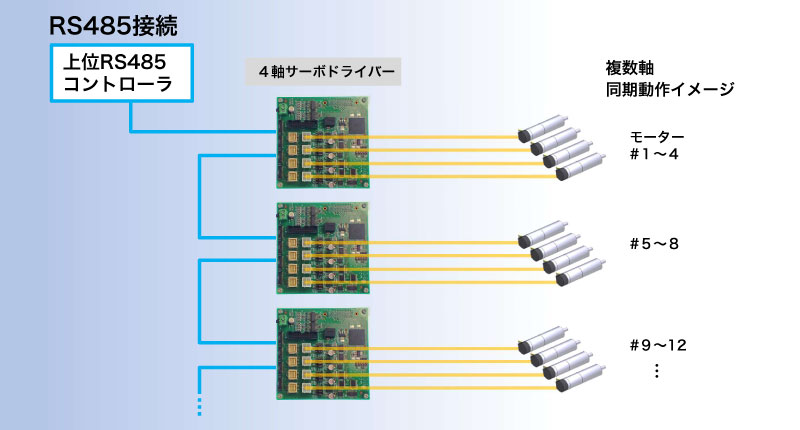
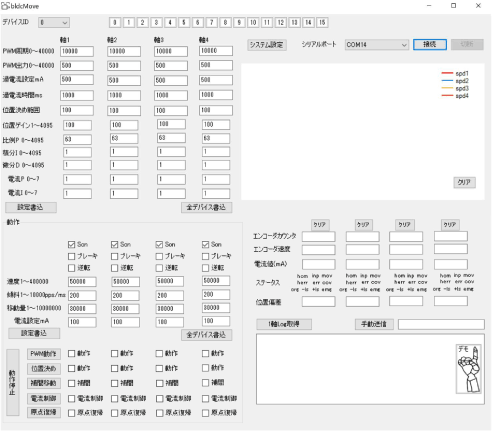
4軸サーボドライバー(開発品)
単軸サーボドライバーPSV24-05Eに加え、多軸サーボドライバーを開発いたしました。ドライバー1台で4軸までの制御が可能であり、位置決め、速度制御、電流制御、原点復帰、直線補間などの機能を有します。 またRS485通信でデイジーチェーン接続(ドライバー同士を繋げること)し、最大16台(4軸×16=64軸)の並列運転が可能です。 コンパクトなデザインでシステムの省スペース化を実現します。ロボットアーム・ハンド、医療機器等の用途に最適です。 初期動作確認や実験等に便利な専用ソフトもご準備しております。
注)
※ 駆動にあたり、モーターにオプションのエンコーダ搭載が必要です。ホールセンサレスのブラシレスモーターには非対応。

参考仕様
| 基板外形 | 100x100x22.2mm (コネクター等の突起物を除く) |
制御 I/F | ・USBシリアル通信 ・RS485通信 ※最大16台までデイジーチェーン接続可能 |
| 対応モーター | 三相ブラシレスDCモーター (ホールセンサ、エンコーダ付き) |
制御方式 | PWM、位置決め、直線補間、電流制御、 原点復帰(原点、リミット、当て止め) |
| 供給電圧 | 24V | エンコーダ接続 | インクリメンタル (アブソリュートエンコーダには非対応) |
| 出力電流 | 連続2A以下、最大4A以下 (モーター1台あたり) |
入力 | ・リミットセンサ入力:8点(4軸×2)
・原点センサ入力:4点(4軸×1) ・非常停止入力:4点(4軸×1) |
4軸サーボドライバー専用 動作確認ソフト
接続例