※当製品は在庫限りで販売終了の予定となります。詳細は営業窓口までお問い合わせください。

近年、バイオ・理化学実験、創薬実験、化粧品開発実験、外観検査など、人と一緒にタスクを行う協働ロボットが急増しています。協働ロボットには、省スペース性や、設置容易性等の観点より、小型軽量化が求められると共に、多種多様なタスクを実現するため、器用なエンドエフェクタが求められています。また、エンドエフェクタが人に接触した場合にも、人がケガをしない安全性も求められています。
Orbrayは、その解決方法として、協働ロボット用ロボットハンド「K3ハンド」をリリース致しました。「器用(Kiyo)」「小型(Kogata)」「軽量(Keiryo)」を両立した新しいコンセプトのロボットハンドです。
各能動関節に、非接触型出力軸エンコーダ、クラッチ機構を搭載したOrbrayオリジナル小型ロボットサーボを使用し、小型軽量でありながら、多指で可動域が広く、指がワークの形状に沿うように持てる「なじみ把持機能」、指を閉じたり、広げたりする器用さと、人との衝突時、クラッチ機構によりケガを回避できる安全性を実現しています。
高可動域、指の開閉により、様々な指姿勢、指先配置に対応し、異形状な物を様々な姿勢で把持可能です。
また、指毎に把持機能と器用動作の役割を分担させることにより、例えば電動ピペットなどの理化学機器の「把持」と「操作」の両立も可能です。
さらに、3本以上の指を均等配置することにより、把持の際、ハンドとワークのアライメントがずれていても、把持動作に伴い、自動的にワークを手のひら中心に引き込むため、比較的ラフな位置決めであっても持つことが可能で、シャーレ、ウェルプレートの把持に適しています。
8DOF*多指ハンド最軽量の290gで、業界最小サイズの協働ロボットアームにも適合し、アーム作動時の慣性力を加味しても、ペイロード**100gを確保できます。
**ペイロード=有効荷重のこと
特徴
- 1. 器用=擬人化=多指・多関節
- → 広い可動域 → 異形状ワークを様々な姿勢で把持
- 2. 小型・軽量(重量290g)※取付フランジ除く
- → 小型協働ロボットアーム可搬重量に適合、ペイロード100gを確保
- 3. 安全 =クラッチ搭載、エッジレスデザイン
- →人との衝突時、衝撃を吸収
仕様
| 最大長さ(全開時) | 290mm | 安全対策 | 各関節にクラッチ搭載 サーマルシャットダウン機能搭載 |
|
|---|---|---|---|---|
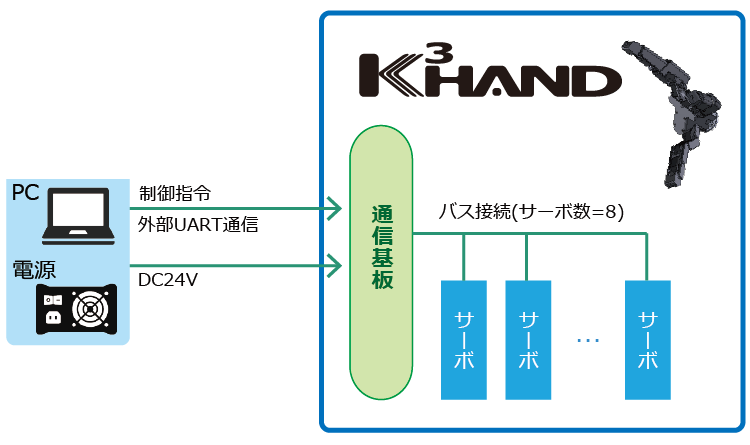
| 重量 | 290g | 制御方式 | コマンド制御 | |
| 指数 | 3 | 通信方式 | 外部UART通信 | |
| 自由度 |
合計:8DOF 拇指(Clever):4DOF 他指(Standard):2DOF ※他指→なじみ把持機構 |
|||
| 電源電圧 | DC24V | |||
| フィードバック信号 | サーボ出力軸角度 モーター電流 |
|||
| 可搬重量 | 100g | |||
カタログ
協働ロボット用エンドエフェクタ協働ロボット用エンドエフェクタ デモ
K3ハンドを遠隔操作する!(千葉大学)
近年、危険な災害現場での作業、遠隔就労など、人に代わって働く遠隔操作ロボットの開発が活発で、汎用的なタスクを行うため、器用なロボットハンドが必要となっています。人間の手と、ロボットハンドには構造の差異があるため、マスタースレーブ制御にて自在に操作することが困難でした。マスター(操作者の手)の把持動作データを圧縮して低次元特徴量に変換した後、スレーブ(K3ハンド)に送信し、K3ハンドに適した把持動作データに復元することで、操作性が向上しました。
※千葉大学大学院工学研究院機械工学コース 並木明夫准教授ご提供>その他の動画はこちら<

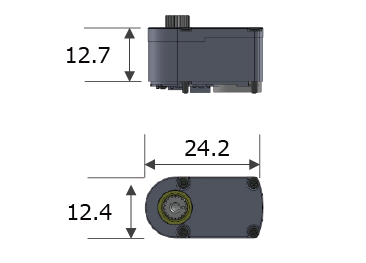
外観図・可動域
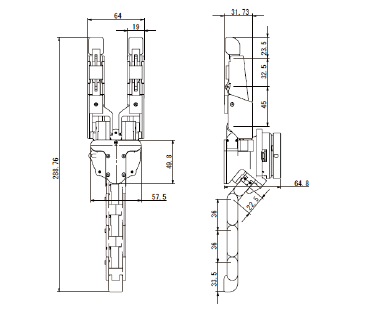
【可動角度範囲】
| 拇指 | 他指 | ||
| 第1関節 | 内外転 | -90~90° | 0~120° |
| 第2関節 | 屈曲 | -50~130° | 0~120° |
| 第3関節 | 屈曲 | -90~90° | 0~90° |
| 第4関節 | 屈曲(指先) | -90~90° | 0~90° |
構成
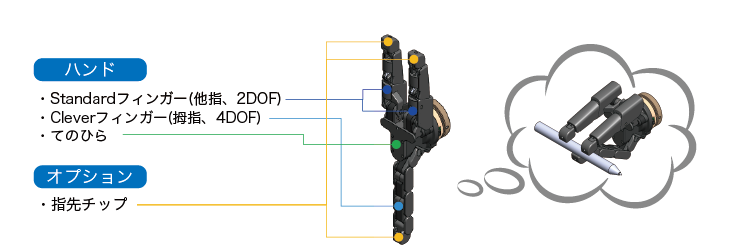
タスクに合せて指先チップ交換可能
システム概要
超小型サーボ
- 1. 小型/薄型
- 業界最小サイズを実現
- 2. 小型ロボットの関節に沿う円弧形状
- 3. 高耐久のクラッチ内蔵
- 破損防止&安全性確保
- 4. 非接触ポテンショメータ



