ブラシレスモーターとブラシモーターの違いとは?Orbrayブラシレスモーターの特徴も解説

目次 [閉じる]
ブラシレスモーター(BLDC)とは
ブラシレスモーター(BLDC)は、整流子やブラシなどの機械的な接触部を取り除いた
昔は機械的に整流子を使って、プラスマイナスを逆転させていましたが、整流子が摩耗してしまうという欠点があり、長寿命化が困難でした。半導体の普及により、電子的に整流子の代わりを電子回路が行い、デメリットとなりうるブラシと整流子をモーターから取り去ることができました。これにより、ブラシレスモーターは機械的整流子とは比較にならないほどの長寿命化が実現しました。
この記事では、ブラシレスモーターとブラシモーターとの違いを説明したいと思います。
ブラシレスモーター詳細はこちら

ブラシレスモーターとブラシモーターの違い
違い①:放熱性
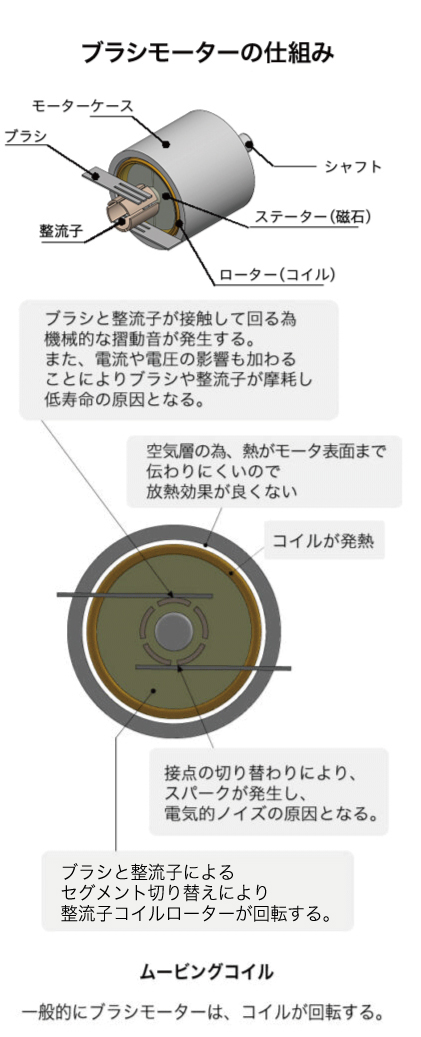
ブラシモーターでは、回転するコイルとモーターハウジングとの間には隙間=空気層があるため通電によって発生した熱が外部に伝わりにくくなります。
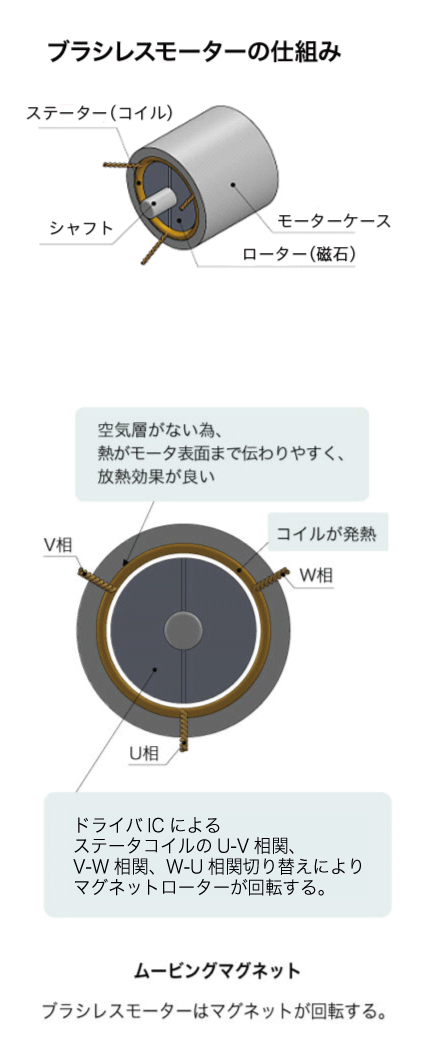
ブラシレスモーターでは、回転するのはマグネットでありコイルは外側のコア側に密着して固定されているため、コイルの熱が外部に伝わりやすく放熱効率が高い構造になっています。モーター内部の温度が上がりすぎるとマグネットの減磁などが起こり特性の低下が発生するという欠点があります。このため放熱性の高いブラシレスの方がハイパワー化に有利となります。
違い②:大電流・ハイパワー
ブラシモーターにおいてはローター側にある整流子と固定側のブラシが通電しながら摺動しているため、大電流を流すと接点が溶断して故障してしまう恐れがあるという欠点があり、電力を投入する上での制限となります。
ブラシレスモーターではドライバ回路により外部から通電するコイルを制御するため、上記の欠点の要因となる接点が無く、放熱性と併せ大電流を投入する事ができます。これらの点から、ブラシレスモーターではハイパワー化を実現する事が可能です。
違い③:機械的ノイズ
ブラシモーターの仕組み
ブラシモーターでは接点が擦れ合うため機械的ノイズとなる摺動音が発生します。また回転に伴い接点が切り替わる際接点でスパークが発生し、これが電気的ノイズ源となります。
ブラシレスモーターの仕組み
ブラシモーターに対してブラシレスでは接点が無いため、それらのノイズ源がありません。 ブラシレスモーターの特徴からもご理解いただける通り、ブラシレスモーターには接点が無いのでハイパワーと長寿命です。
ブラシレスモーターは放熱性、最大回転数や長寿命、ノイズ等の点でブラシモーターに優位ではありますが、直流電源を接続するだけで動くブラシモーターと違い、制御回路を使用して駆動する必要があるのが欠点とも言えます。また、ローター位置を検出するためのセンサーの有無によって、適切な制御回路を選ぶ必要があります。
※ブラシレスサーボドライバ ご参考 ドライバー SSD06-R5A / ドライバー SHSD24-01A
Orbrayのブラシモーターの特徴
一般的にスロット付き電機子型(鉄心付き)ブラシモーターとOrbrayのコアレスブラシモーターとを比較すると、当社のブラシモーターは電機子巻線がスロット内に入っていないので、コイルの漏れインダクタンスが小さく整流条件が良いことが特徴です。
磁気抵抗変化が少ないのでコギング(鉄芯に起因するトルク脈動)が少なく、かつ 電気的ノイズが少ない製品となります。
Orbrayのブラシレスモーター(BLDC)の特徴
無接点のため、非常にハイパワー、長寿命であり、高い信頼性が確保できます
また、Orbrayのブラシレスモーターはステータにスロットを持たないスロットレス構造です。スロットとは磁気コアに設けられた隙間のことですが、スロットがあるとマグネットがスロット間の凸部に吸着することによりコギングという回転の脈動が発生します。
こうしたコギングは、振動・騒音や回転精度・スムーズさに影響を与えます。
Orbrayのブラシレスモーターは、コアにカップ状コイルを設置し、その内部にローターのマグネットが配置されています。そのため、コイル・マグネットがいかなる位置にあっても均一な磁気吸引力を受ける為、コギングがなくスムーズな回転を可能とします。
トルク・寿命面の点に加え、Orbrayのモーターはロボットや医療機器などに特にセンシティブな用途に適しています。
小径サイズからラインアップ
Orbrayでは世界最小モーターの開発で培った技術を生かし、ブラシレスモーター標準品として外径φ4mmサイズからラインアップしています。コンパクトかつトルク・寿命・静粛性・低振動性を高いレベルで実現したOrbrayのブラシレスモーターは、携帯型の機器や小さくてかわいい動作が求められるコミュニケーションロボット、狭ピッチでアクチュエータを配置しなければならない特殊な天体望遠鏡などの装置、ロボットハンドのフィンガー部への搭載など、限られたスペースの中で高い性能を求められる用途にも解決策をご提供します。
ブラシレスモーターの長寿命化
ブラシレスモーターラインアップのうち、B4Sシリーズは4極マグネットを採用した高トルクモーターです。マグネットを通常の2極から4極にすることにより有効磁束面積が増大し、トルク定数の向上と低消費電流化を達成しました。機械的時定数の向上により起動性・応答性もさらに高くなりました。 B4Sシリーズは軸受構造についてもボールベアリングを標準とし、信頼性面でも高トルク化に対応しております。
ブラシレスモーターとブラシモーターの用途分野別比較
【凡例】
◎:最適(特に優れた性能を発揮)
○:適している
△:使用可能だが最適ではない
医療機器分野
| 用途 | ブラシ モーター |
ブラシレス モーター |
選択ポイント |
|---|---|---|---|
| 麻酔器 | 〇 | ◎ | 静音性、一定速度安定性が重要。ブラシレスモーターはコギング(磁石の引っ掛かり)が無く、静かで安定した駆動を実現。 |
| 内視鏡 | 〇 | ◎ | 繊細かつ回転ムラの無い駆動、品質の高さと安全性が必要。 |
| 薬液ポンプ | ◎ | 〇 | 軽量・コンパクト性、バッテリー駆動時の低消費電力が重要。フィードバックによる精密な制御も必要。 |
| 歯科用 ハンドピース |
〇 | ◎ | 高速回転、低振動、高い耐久性が必要。患者の快適性と治療精度に直結。 |
| 医療用ポンプ | ◎ | 〇 | 安定した流量制御、低ノイズ、信頼性が重要。輸液や透析などの生命維持装置に使用。 |
精密機器・計測機器分野
| 用途 | ブラシ モーター |
ブラシレス モーター |
選択ポイント |
|---|---|---|---|
| 望遠鏡 | △ | ◎ | 高精度な動作、コンパクトサイズ、位置決め精度が重要。天体観測では多数の天体からの光を集める必要があり、精密な制御が必須。 |
| 測量機器 | ◎ | 〇 | 定回転数での安定動作、回転ムラの無さが重要。応答性に優れたモーターが必要。 |
| 顕微鏡 ステージ |
△ | ◎ | 微細な位置決め、振動抑制、低速安定性が重要。研究や検査の精度に直結。 |
| 分析機器 | 〇 | ◎ | 正確な速度制御、長時間安定動作、低発熱が必要。サンプル分析の再現性に影響。 |
| 光学機器フォーカス機構 | 〇 | ◎ | 精密な位置決め、バックラッシュの少なさが重要。画像品質に直結。 |
半導体製造装置分野
| 用途 | ブラシ モーター |
ブラシレス モーター |
選択ポイント |
|---|---|---|---|
| マウンター ヘッド |
△ | ◎ | 小型かつ精度の良い位置決め、中空シャフト対応が重要。半導体製造装置では高精度・短時間での動作が必要。 |
| テープ フィーダー |
◎ | 〇 | 薄型化、位置決め精度が重要。特に扁平モーターの採用が増加傾向。半導体実装時の部品供給に使用。 |
| ウェハー 搬送ロボット |
△ | ◎ | 高精度位置決め、クリーン環境適合、低発塵が必須。製造歩留まりに直結。 |
| 検査装置 | 〇 | ◎ | 高速・高精度な動作、長時間安定性が重要。製品品質の保証に不可欠。 |
ロボティクス分野
| 用途 | ブラシ モーター |
ブラシレス モーター |
選択ポイント |
|---|---|---|---|
| ロボット ハンド |
△ | ◎ | 多自由度、小型化、高出力、無通電保持機能が重要。特に指の狭隘スペースに動力機構を搭載するため小型化が必須。 |
| コミュニ ケーション ロボット |
△ | ◎ | 長時間稼働、高トルク、静音性が重要。人との対話を目的とするため静音性が特に重視される。 |
| エンド エフェクタ |
△ | ◎ | 小型、高出力、高効率、発熱抑制が重要。物を把持した際の発熱問題を解決するため効率性が重視される。 |
| 協働ロボット関節 | 〇 | ◎ | 高トルク密度、精密制御、安全性が重要。人との協働作業に必要な柔軟性と安全性を確保。 |
映像・放送機器分野
| 用途 | ブラシ モーター |
ブラシレス モーター |
選択ポイント |
|---|---|---|---|
| ドローン ジンバル |
△ | ◎ | 軽量、応答性が重要。カメラの動きに素早く反応する必要があり、複数軸での制御が必要。 |
| 放送局用 カメラレンズ |
◎ | 〇 | 応答性、静音性、低電圧駆動が重要。撮影時のモーター音が録音されないよう静音性が特に重視される。 |
| カメラオート フォーカス |
◎ | 〇 | 高速応答、低消費電力、静音性が重要。撮影体験の質に直結。 |
| 業務用プロ ジェクター |
〇 | ◎ | 長寿命、静音性、安定動作が必要。長時間の映像投影に対応。 |
セキュリティ・産業機器分野
| 用途 | ブラシ モーター |
ブラシレス モーター |
選択ポイント |
|---|---|---|---|
| 電気錠 | ◎ | △ | 応答性、高温・低温対応、長寿命が重要。頻繁な施錠・開錠操作に耐える耐久性が必要。 |
| セキュリティ カメラ |
◎ | △ | 長寿命、冷温対応、応答性が重要。24時間稼働するため信頼性が特に重視される。 |
| 監視カメラ 旋回機構 |
〇 | ◎ | 精密な位置制御、静音性、耐候性が必要。屋外設置にも対応。 |
オフィス・家電機器分野
| 用途 | ブラシ モーター |
ブラシレス モーター |
選択ポイント |
|---|---|---|---|
| 空気清浄機 ファン |
〇 | ◎ | 静音性、効率性、長寿命が必要。24時間稼働にも対応。 |
ホビー・レジャー分野
| 用途 | ブラシ モーター |
ブラシレス モーター |
選択ポイント |
|---|---|---|---|
| ラジコン/RC | 〇 | ◎ | 応答性、高トルクが重要。特に高速応答(15ms以下)が求められる。 |
| 電動釣り糸 巻取機 |
〇 | ◎ | 高トルク、防水性、バッテリー効率が必要。屋外での長時間使用に対応。 |
パーソナルケア・特殊機器分野
| 用途 | ブラシ モーター |
ブラシレス モーター |
選択ポイント |
|---|---|---|---|
| 防塵マスク | ◎ | △ | 応答性、低消費電流、低背型が重要。使用者の呼吸に合わせた動作が必要。 |
| タトゥー マシン |
◎ | 〇 | 高速回転、低振動が重要。術者の負担を減らすため振動抑制が必須。 |
モーター選択の主要基準
ブラシモーターが適している用途
- コスト重視の用途:一般的にブラシレスモーターより安価
- 単純な制御で十分な用途:複雑な制御回路が不要
- バッテリー駆動の携帯機器:軽量なコイルがローターとして回転するため省電力
- 高温・低温環境での使用:特殊設計により過酷環境に対応可能
- 高頻度の起動・停止が必要な用途:即応性に優れる
ブラシレスモーターが適している用途
- 長寿命が求められる用途:ブラシ摩耗がないため寿命が長い
- 静音性が重要な用途:モーターノイズが少なく静かな動作が可能
- 高精度な位置決めが必要な用途:回転ムラが少なく安定した動作
- 高効率・低発熱が求められる用途:エネルギー効率が高く発熱が少ない
- 高速回転が必要な用途:高回転域でも安定した性能を発揮
選択時の考慮ポイント
- サイズと重量: 用途に合わせた最適なサイズ選定
- 出力と効率: 必要なトルクと効率のバランス
- 制御の複雑さ: 必要な制御精度と制御システムの複雑さ
- 動作環境: 温度、湿度、振動などの環境条件
- コスト: 初期コストだけでなく、長期運用コストも考慮
- 信頼性と寿命: 用途に応じた適切な耐久性の選択
参考文献
『はじめてのモーター技術』 秋山 勇治 工業調査会 1999


お問い合わせは下記フォームに入力し、確認ボタンを押して下さい。
※お問い合わせフォームからのセールス等はお断りいたします。送信いただいても対応いたしかねます。