協働ロボットとは? 導入が求められる協働ロボットの機能、性能について解説

協働ロボットとは
協働ロボットは、人と同じ場所で、人と協力しながら作業を行うロボットです。人と同じように動作し、様々な作業へ柔軟に対応することが可能です。近年、生産現場では人手不足が深刻化しています。大量生産を行うような大工場であれば、産業用ロボットを導入して自動化を行うことも可能です。しかし、生産量が少ない小さな工場では産業用ロボットを導入して自動化することは簡単なことではありません。もう一人の作業者として協働ロボットを製造ラインに加えることができれば、人手不足の解消につながります。
従来の産業用ロボットは、人の動きを遥かに超える、強力、高速な動作で作業を行うものでした。近づくことは危険なため、安全な柵で隔離された状態で動作し、ロボット専用の生産ライン上で作業を行います。同じ大きさ、形のものを大量に製造するような際には、大いに活躍します。その代わり、ロボット自体が大型であったり、作業スペースを確保したりする必要があるため、設置には高いハードルがありました。
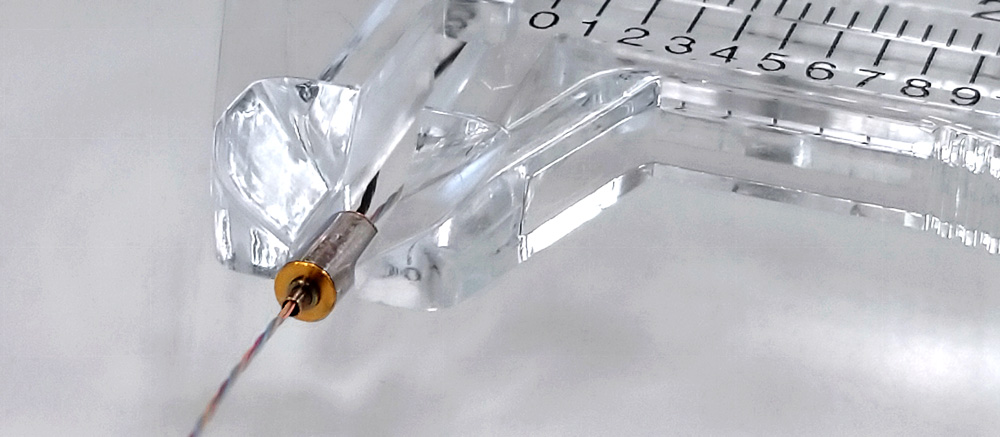
協働ロボット用エンドエフェクタK3HANDによる試験管の把持・操作
また、ユーザーの要求の変化も時代とともに加速し、多品種少量生産・変種変量生産の需要も高まっています。多品種少量生産・変種変量生産では、柔軟に製造ラインを変更して生産効率を上げる必要がありますが、大型の産業用ロボットでは簡単に対応できません。小型軽量でスペースを取らず、設置が容易で多種多様な作業を行える協働ロボットならば、品種の変更があれば直ちに動作や設置位置を変えて製造に利用できます。人と異なり、メンテナンスや電力消失などを除き、動き続けることが可能です。複数回の交代制の製造ラインでも、人のように交代することなく動き続けるので、生産効率を上げることにも大いに役立ちます。
協働ロボットは今後の製造現場を支えるため、無くてはならない存在です。
自動車や精密機器製造などの工場では、溶接や塗装、組み立て作業用など、様々な産業用ロボットが動いています。産業用ロボットは、人が動かせないような重い部品や装置を簡単に移動させ、同じ動作を高速で正確に繰り返すことが可能です。製造ラインの自動化に活用され、生産効率を大幅に引き上げてきました。
近年、このような産業用ロボットとは異なり、人と一緒になって作業をおこなう協働ロボットの導入が増加しています。協働ロボットは、今までロボットの導入が困難だった製造現場でも活用されるようになり、人手不足解消や生産効率向上などに役立っています。
協働ロボットに求められるもの - 人と同じ作業ができる手
協働ロボットには、今までの産業用ロボットとは異なる性能や機能が求められます。その一つが、人と同じように繊細に物を把持できる手です。協働ロボットは、製造ラインに置かれる場合は作業中に移動させる必要がなく、タイヤなどを搭載すれば移動できるので、人や動物のように2本、4本脚で移動できなくても問題ありません。しかし、人と同じ作業(動作)を行うための手や腕が必要になります。
人の手は、柔らかい、薄い、滑りやすい物でも、潰したり壊したりすることなく把持することができます。複雑な形状の物も、指先を形に合わせて動かし、問題なく把持することが可能です。協働ロボットも、これと同じように物を把持し、腕を使って自由に動かせなければ、人と同じ作業を行うことは難しくなります。
協働ロボットハンドは、多関節で複雑に曲がる指を多数持つものや、ゴム素材で柔軟に曲がるものなど各種あります。微細な動きを実現するため、精密に動作するサーボモーターを備え、繊細に把持するだけでなく、細かい操作も可能にした手もあります。作業に合わせて手を交換することも可能です。
また、手を精密に動かすためには、把持する対象の形状や位置を正確にとらえるための画像処理技術や、力を調整するためのセンサー技術、制御技術も必要です。精巧に作られた手と高度な制御技術により、協働ロボットは人と同じように、繊細な作業を実行します。 ロボットの手をエンドエフェクタとも表現しますが、この協働ロボット用エンドエフェクタの性能こそが、ロボットの器用さを左右すると言っても過言ではありません。
協働ロボットに求められるもの - 安全、小型軽量
協働ロボットに求められる性能、機能でもう一つ重要なものが安全性です。協働ロボットは人と同じ環境で動作しています。ロボットは人よりも強力、高速で動くことが可能であり、高速動作中に人と接触したら命にかかわる大事故になります。人が接近したら接触前に停止したり、接触しても怪我の無いように減速したりする機能を持っている必要があります。 協働ロボットでは、人が一定の距離に近づいたことを感知するエリアセンサーを備えたものがあります。これにより、接触前に停止や減速させて事故を回避することが可能です。また、一定以上の力がかかると自動停止したり、クラッチ機構により、万が一、人と衝突した場合にも衝撃を吸収する安全機能を備えたものもあります。接触しても大事故につながりません。
ほかにも、協働ロボットは小型軽量であることも求められます。人の配置に合わせて自由にレイアウトできるように、設置場所を取らず、容易に移動できることが必要です。作業場所が食品工場や医薬品工場であるならば、オイル漏れや部品脱落などが発生しない機構であることや、衛生基準を満たしていることなども求められます。
産業用ロボットのように、人がロボットの動作に合わせるのではなく、ロボットが人の動作に合わせて安全に動くことが、協働ロボットでは必要です。
広がる協働ロボットの活用範囲
協働ロボットは、様々な業界で導入が進んでいます。例えば、従来大型の産業用ロボットが使われてきた自動車業界でも、人による組み立て作業のサポートとして協働ロボットが動作しています。精密機器製造ラインでも、人の行う作業と並んで、部品の移動(キッティング)や組付け、製品の整列など各種作業に導入されています。食品製造ラインでは、形が異なる食材を決まった位置に取り分けていくような作業でも協働ロボットが活用されています。

また、外観検査でも活用されます。外観検査は非常に繊細な観察が必要となり、人が行う場合、検査員の疲労が検出精度に影響を及ぼすと言われています。疲労することなく、さまざまな形状の製品を、いろいろな方向・角度から観察することが可能な協働ロボットの得意な作業と言えるでしょう。
さらに、製造現場だけでなく、バイオ・理化学実験、創薬実験、病理検査のような、化学、医療の現場でも協働ロボットが活用されるようになりました。電動ピペットなどの細かい理化学機器を把持、操作するには、繊細な動作ができる手をもった協働ロボットが最適です。医療、研究従事者の作業を、24時間休むことなくサポートできます。
協働ロボットの活用範囲は、今後もさらに広がっていきます。
Orbrayの協働ロボット用エンドエフェクタ K3 handはこちら

関連記事
エンドエフェクタとは?
お問い合わせは下記フォームに入力し、確認ボタンを押して下さい。
※お問い合わせフォームからのセールス等はお断りいたします。送信いただいても対応いたしかねます。