ロボットハンドとは
エンドエフェクタの一つであるロボットハンドは、ロボットアームの先端に取り付けられて、人の手のように作業を行う機器です。ロボットアームは、工場内での部品加工、部品搬送、組み立て作業や、物流倉庫内での荷物の移動、創薬分野での分注作業など、様々な分野、用途で活用されています。
ロボットハンドの種類と特徴

ロボットハンドは、ロボットアームの先端に取り付けられ、対象物に対して人の手のように様々な作業を行います。
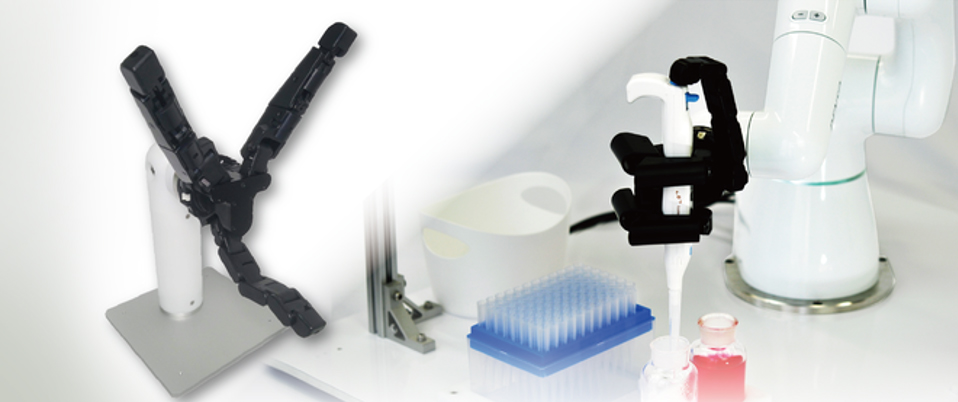
例えば、2本、3本の爪を持ったロボットハンドがあります。そのようなタイプのロボットハンドは、人が指先で物を挟んで掴むように、爪を開閉して物を把持します。関節を持った指を複数備えたロボットハンドは、人の手のように指を動かし、複雑なものを掴むことが可能です。柔らかいゴム製の指を持ったロボットハンドは、壊れやすいものも指を曲げて柔らかく包むことで、把持することができます。指先に吸盤や磁石を備えたロボットハンドもあります。そのようなロボットハンドは、指で挟むと同時に必要に応じて吸着することで、物をしっかり把持することが可能です。
把持する対象に応じて、各種のロボットハンドが開発されています。
ロボットハンドの用途
ロボットハンドが行える作業は、物を把持して移動や回転をさせたり、機器を把持しながらスイッチを操作したりするなど各種あります。例えば、製造現場で使用されるスカラロボットの先端に取り付けられたロボットハンドは、細かい部品を指で掴み、所定の場所に移動させて組み立て作業を行います。医療や化学の検査工程で使われる分注用のロボットハンドは、人間の手と同じようにピペットを把持して、決まった量の薬品を大量の試験管に正確に入れていくことが可能です。食品工場で使用されるロボットハンドは、柔らかい食品を潰すことなく掴んで移動させていきます。また、近年製造現場で導入が進む協働ロボットは、アームの先端に設けられたロボットハンドで、人と同じように道具や部品を把持して作業を進めていきます。
単純な繰り返し作業や、過酷な環境での連続作業を、正確に素早く、安全に、止まることなく続けるには、ロボットハンドが必要です。食品工場のように衛生環境を維持する必要のある製造現場では、人の手を介さずに製造できるので品質維持もできます。 ロボットハンドは、作業効率の向上、人件費削減、品質向上に大きく貢献できるのです。
ロボットハンドの動力と用途
ロボットハンドの動力は、インフラ環境に応じて、電気駆動、エア駆動(圧縮・真空)、油圧駆動などさまざまです。
エア駆動のロボットハンドは、対象物を吸着して搬送する用途や、一定以上の力で挟んで搬送する用途などで利用されます。油圧駆動のロボットハンドは、重量物の把持や搬送に主に用いられます。微細な部品を掴んで正確に動かす用途や、柔らかい物を掴む用途のように、人の手と同じような繊細な動きが必要なロボットハンドでは、小型モーターによる電気駆動が一般的です。小型モーターは、エアや油圧よりも移動量や力を精密に制御することが可能なため、繊細な作業を行うロボットハンドに向いています。

ロボットハンドを効率よく動かす小型モーター
特に、人の手の動きを模したロボットハンドでは、多関節が必須であり、指あるいは掌の中に多くのモーターが搭載されています。また、人の手の代わりに物を掴んだり、道具を操作したりする際には、ロボットハンドのサイズは人の手のサイズに合わせて作られます。限られたスペース内に搭載するため、小型で精密な駆動が可能な小型モーターが必要です。小型モーターの動力を正確に伝えることができる、小型の駆動機構や、外部から想定外の負荷がかかった場合にその力を逃がすための小型クラッチ機構も必要になります。
他にも、従来のロボットハンドは、対象物を把持した状態を維持し続けるために大電流を小型モーターに供給し続ける必要がありました。対象物を把持した後、小型モーターへの通電が無くなっても、指がロックされて握り続ける機構が備えられていれば、急に電源が落ちるトラブルがあっても対象物を落下させることなく、安全に把持することができます。把持の際、ロックを利用すれば、消費電力や温度上昇を抑えることもできるので、効率よくロボットハンドを駆動できます。
クラッチ機能紹介動画
お問い合わせは下記フォームに入力し、確認ボタンを押して下さい。
※お問い合わせフォームからのセールス等はお断りいたします。送信いただいても対応いたしかねます。